本篇内容引自豆瓣绮玛蓝的日记,转在这里防止被删。
奈飞的电视剧《三体》一开场就是炸裂的场面,导致有人说这是奈飞抹黑。

而实际上,在这个情节上,奈飞非常尊重原著: 继续阅读有奶便是娘的爱因斯坦

眼看到年底了,手机2021年的Reith Lectures还没有更新。去BBC网站一看,内容已经发布到iTunes Podcast好几天了,只是我的手机没有收到更新。
连上VPN,再刷新手机上的程序,仍然没有新内容。尝试搜索reith lectures,只有几条无关的结果。
直接上苹果的podcast目录页,找到这个节目:
https://podcasts.apple.com/gb/podcast/the-reith-lectures/id318705261
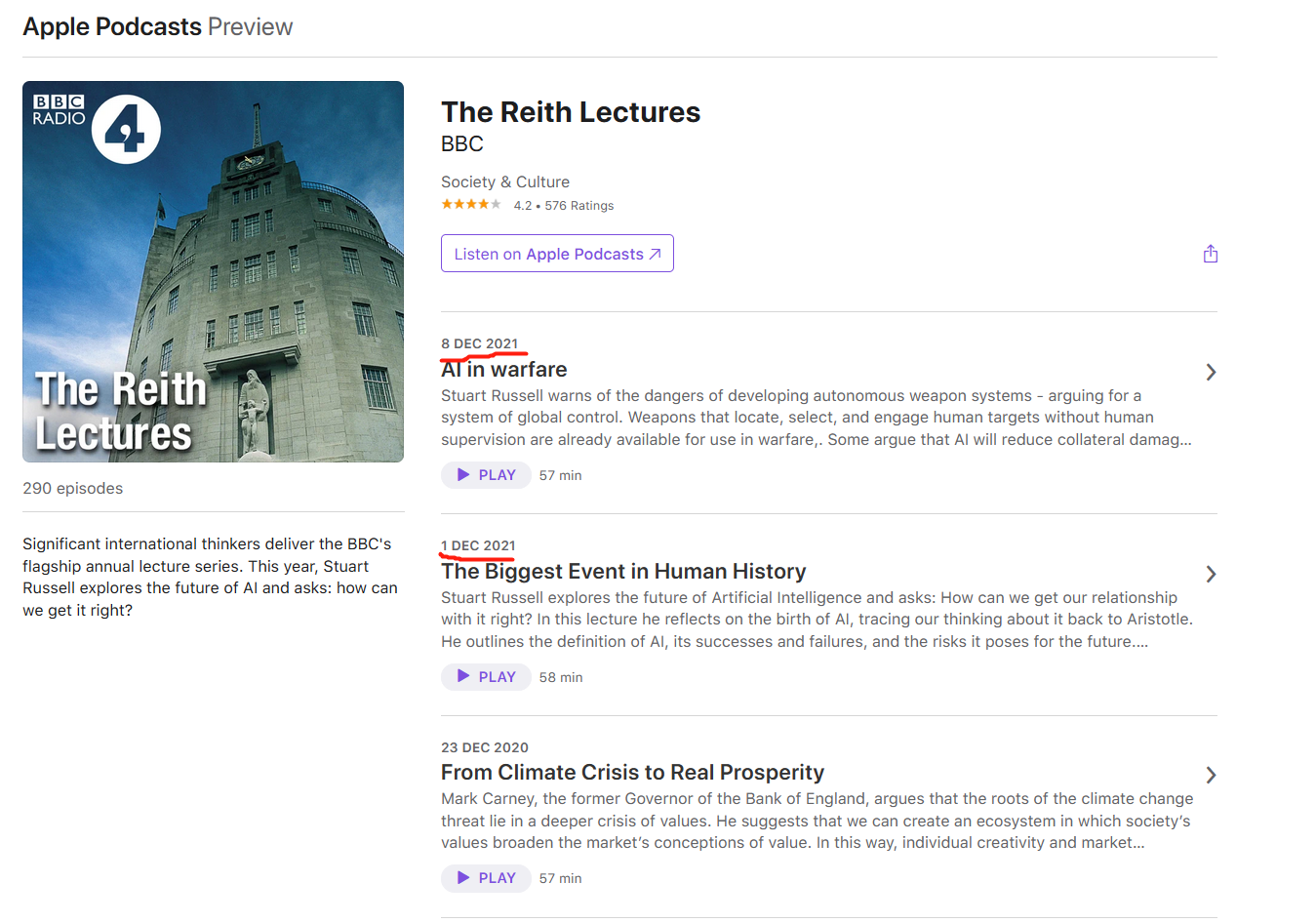
可以很清楚看到已经有两集更新,这时候点“Listen on Apple Podcasts”,会转入iTunes,然后弹出如下对话框:
以后要想接着听,就需要VPN,还需要使用国外的iTunes帐号了。文化入侵遭遇铜墙铁壁!
为什么天空是蓝色的?
当我们抬头仰望,那一抹蔚蓝似乎理所当然。但这片纯净的色彩,其实是光与物质长达百亿年的博弈,是人类智慧在一场永无止境的接力赛中,拼凑出的宏大图景。
* * *
线索一:玻璃中的彩虹
故事始于1666年。在那场著名的鼠疫隔离期间,年轻的牛顿在昏暗的房间里凿开了一个小孔。
一束白光穿过棱镜,碎成了红、橙、黄、绿、蓝、靖、紫。那道彩带静静地铺在对面的墙上,像是白光深藏了一生的秘密,终于在暗室中向一个年轻人坦白。
在那之前,人们以为棱镜给光“染色”了。但牛顿意识到:色彩并非外加,而是白光本身的一部分。他用第二个棱镜将七彩光重新合成为白光。这一刻,人类第一次理解了光的本质:多样性隐藏在统一之中。
但牛顿心中仍有疑惑。他坚信光是粒子——微小的、坚硬的、像子弹一样直线飞行的小球。这个模型简洁而有力,可以解释光的反射和折射。但它留下了一个尖锐的问题:如果光是粒子,它为何会弯曲?为何天空不是七彩,偏偏是蓝色?
这个问题悬而未决,等待了整整一个世纪。
线索二:两条缝隙的叛乱
粒子论统治了近百年。牛顿的威望如此之重,以至于没什么人敢认真质疑。直到1801年,一个名叫托马斯·杨的英国医生,做了一个看似简单得近乎天真的实验。
他让一束光同时穿过两条极细的狭缝。如果光真的是粒子,墙上应该出现两条亮纹——就像向墙上射两次子弹,会留下两个弹孔。但实际出现的,是明暗交替的条纹——就像两列水波相遇时的叠加与抵消。
波峰遇上波峰,光变亮;波峰遇上波谷,光消失。粒子不会这样行事。波才会。
这个实验的震撼之处,不仅在于它证明了光的波动性,更在于它挑战了一个时代最不可触碰的权威。杨的论文最初几乎无人理睡。但光的波动性已经不可逆地被开启了。接下来的问题变成了:如果光是波,它是什么的波?它在什么东西里波动?
线索三:电与磁的婚礼
杨的问题悬浮了半个世纪。在这段时间里,法拉第发现电能生磁,磁也能生电。电与磁不再是两种力,而是同一枚硬币的两面。但这枚硬币还没有被完整地翻译成数学。
1865年,苏格兰人麦克斯韦完成了这件事。他用四个简洁的方程,将电场和磁场织成一体。但方程写完后,他发现了一个谁都没有预料到的东西:方程自然地预言了一种波——一种电场和磁场互相激发、向前传播的波。他算出了这种波的速度。结果与光速完美吻合。
麦克斯韦意识到:光就是电磁波。它不需要任何介质——没有以太,没有载体。电场的崩塽催生磁场,磁场的崩塽催生电场,它们互相搬运,将能量传向远方。光是自给自足的。
而且,麦克斯韦的方程天然地包含了波长的概念。红光波长较长,像沉稳的长浪;蓝紫光波长较短,像急促的跳动。牛顿解析出的七色,终于有了更深层的身份:它们是同一种波动的不同频率。
线索四:苍穹的答案
现在,当我们已经知道光是电磁波,而蓝光的波长比红光短,那个关于天空的古老问题终于可以被解答了。
瑞利爵士在十九世纪末揭开了谜底。大气中漂浮着无数微小的分子——氮、氧、氩。它们的尺寸远小于光的波长,但恰恰是这种悬殊的尺寸差异,让不同颜色的光遭受了截然不同的命运。
短波的蓝光撞上这些分子,四散逃逸,填满了整个苍穹。而长波的红光几乎畅行无阻,直接穿过大气。瑞利用数学精确地描述了这个过程:散射强度与波长的四次方成反比。蓝光的波长约为红光的一半,所以它被散射的强度是红光的十六倍。
天空为什么是蓝色的?因为蓝光打了更多的“台球”。每一个大气分子都是一个微型的灵光“灯笼”,把蓝光向各个方向重新发射。数十亿亿个这样的灯笼同时点亮,便是我们头顶的蓝。
这就是瑞利散射。故事讲到这里,似乎已经圆满。但物理学往往在最自满的时刻跌入深渊。
线索五:裂缝与重生
经典波动理论在解释天空颜色时大获全胜,但当它试图计算一个热物体发出的辐射时,却崩溃了。按照经典理论,一个加热的炉子应该在短波方向释放无穷大的能量——它会吐出致命的紫外线和伽马射线。这显然荒谬。
物理学家将这个尴尬的悳论称为“紫外灾难”。它像一道裂缝,划破了经典物理学光滑的表面。
1900年,普朗克被迫提出一个近乎绝望的假设:能量不是连续流淌的河流,而是一份一份的,像一颗颗不可再分的沙粒。他把这最小的一份,叫做“量子”。普朗克本人并不喜欢这个结果。他觉得这是一个数学上的技巧,而非现实。但现实不管他的喜好。
五年后,爱因斯坦站了出来。他提议,光既是波,也是一颗颗光子。每一份能量都有确定的大小,由光的频率决定。这不是折中方案,而是一个全新的世界观:光同时是粒子和波,取决于你怎么观察它。
量子力学的诞生,彻底改写了我们与光的关系。原子内部,电子在轨道间闪转腾挪。当它跌落,便释放出特定颜色的光。如果我们强制一群原子步调一致地跌落,激光(LASER)便诞生了——它是世界上最纯净、最锋利的光,是人类对光子绝对的掌控。在半导体的一进一出间,电直接化作光,LED的奇迹高效且冷峻。
线索六:进化的审判
所有的物理奇迹,最终都要经过我们眼球的审判。
我们的眼睛,本质上是两台无比精密的生物相机。光线穿过晶状体,落在视网膜上。那里驻守着数百万个视锥细胞,它们表面分布着敏感的视蛋白。S-视蛋白捕捉短波(蓝),M-视蛋白捕捉中波(绿),L-视蛋白捕捉长波(红)。
当光子击中蛋白,分子结构瞬间改变,引发一股微弱的电脉冲。这信号沿着视觉神经,像闪电般划过大脑。但大脑并不被动地“接收”蓝色。视觉皮层将三种视锥细胞的信号进行比较、加权、推断,最终构建出一个主观的色彩体验。
换句话说,蓝色并不存在于天空中。它被创造于你的颅骨之内。我们看到的不是世界,而是光与神经系统的交响。
线索七:谁的蓝是蓝?
如果蓝色是主观的,那我们立刻面临一个巨大的工程难题。
每个人的视锥细胞灵敏度略有不同,每一台相机的传感器、每一块屏幕的发光特性也各有偏差。当印刷、摄影、电视、计算机相继入场,问题变得不可回避:我的屏幕上的“蓝”,和你屏幕上的“蓝”,是同一种颜色吗?
这不是哲学思辨,而是严肃的工业需求。印刷厂需要确保客户看到的样张和最终印刷品色彩一致;医学影像中,一个色差可能意味着误诊;电影制作中,导演在监视器上调好的颜色必须在影院银幕上忠实再现。
于是科学家建立了一个数学的温室:色彩空间(Color Space)。1931年,CIE国际照明委员会通过实验,让一组观察者对着光源反复匹配颜色,用统计数据建立了人类色觉的数学模型。从此,每一种颜色都有了精确的经纬度。
ICC配置文件则像是一本翻译手册。每台设备都有自己的“方言”——它能显示哪些颜色、不能显示哪些。ICC文件确保光信号在不同设备间传递时,灵魂不会走丢。这不仅是工程,更是人类对真实性的执着。
线索八:欲望的色泽
在科学驯服光线之前,颜色是权力的象征。
古代画师为了得到最纯正的蓝色,必须远赴阿富汗开采青金石。将它研磨成粉,就是群青——历史上最珍贵的颜料。其价值一度贵过黄金。皇室披上这种蓝色,是为了将天空的权柄穿在身上。
这种对稀有色的渴望,驱动了化学与技术的疑狂进步。1704年,一位柏林染匠意外制造出了普鲁士蓝——第一种现代合成颜料。它让蓝色从贵族的特权,变成了画家的日常。十九世纪,合成群青和钴蓝接踵而至,颜色的民主化悄然完成。二十世纪,YInMn蓝的偶然发现再次证明:在色彩的矿脉里,人类远未挖到底。
直到今天,借助纳米技术和量子点,我们终于制造出了比自然界任何花朵都更鲜艳、更持久的极致色彩。
* * *
结语
天空为什么是蓝色的?
这个问题拉出了八条线索,每一条都指向一个更深的疑问。牛顿拆解了白光,杨证明了波动,麦克斯韦统一了电磁,瑞利解释了散射,普朗克和爱因斯坦重建了光的本质。而我们的眼睛和大脑,在亿万年进化中,学会了将这一切翻译成一个字:蓝。
从牛顿的那个小孔,到你此刻手中屏幕发射出的蓝光,我们不仅在观察光,我们正在通过科学,成为光的一部分。
SSH login is supposed to be fast – All it needs are a key exchange to establish a secure channel and then an authentication process, which are both trivial tasks to modern computers. However, as it often happens, a simple login might take no less than 15 seconds.
I ran into this problem recently and had a investigation. As it turned out, there are multitude of factors that might affect the speed of the SSH login process. From the most obvious the to most inconspicuous, here are them:
This is the main configuration file that controls the behavior of the ssh daemon. In this file, you want to make sure the following features are disabled:
在现代社会中,光和颜色已经深深融入了我们日常生活的方方面面。它们的存在是如此自然,以至于我们很少停下来思考它们的普遍性和重要性。光与颜色无处不在,从清晨的第一缕阳光,到入睡前的最后一瞥屏幕,它们贯穿了我们一整天的生活。
每天早晨,当我们睁开眼睛,阳光透过窗帘照射进房间,为我们揭开新的一天。自然光充斥着我们的生活空间,照亮我们起居的每一个角落。无论是在家中、办公室、街道,还是在商场、咖啡馆,自然光和人工光源交织在一起,为我们的生活环境增添亮度和温暖。
在家中,光不仅仅是为了照明。厨房的灯光帮助我们烹饪,餐厅的吊灯营造用餐氛围,卧室的床头灯提供阅读的舒适光线,浴室的镜前灯则确保我们能清晰地看见自己。每个房间的灯光设计都考虑到了使用的便利性和视觉效果,光成为了家居设计的重要组成部分。
颜色同样无处不在。家里的墙壁、家具、床上用品、装饰品,每一样物品都有其特定的颜色,这些颜色组合在一起,定义了我们生活空间的整体风格和氛围。墙壁的颜色可能是柔和的米色或温暖的橙色,家具可能是深沉的木色或现代的黑白对比,这些色彩元素每天都在潜移默化地影响着我们的感知。
离开家门,我们走进的每一个公共空间,无论是街道、商店、办公室还是公园,光与颜色依然无处不在。街道上的交通信号灯通过颜色指挥着车辆和行人,广告牌和店铺招牌用鲜艳的颜色吸引着过路人的注意。商场的橱窗设计、展品的灯光布置,甚至超市货架上的商品摆放,都是利用光与颜色来引导我们的视线和选择。
在工作场所,光和颜色的存在同样不可或缺。办公室的照明不仅仅是为了看清文件和电脑屏幕,还关系到员工的舒适度和工作效率。办公桌上的台灯、会议室中的吊灯、走廊里的壁灯,这些灯光设计都经过精心考虑,以确保在不同的场景下提供最合适的光线。墙壁的颜色、地毯的图案、办公家具的色调,这些元素构成了办公室的整体视觉效果,影响着我们每天的工作环境。
随着科技的发展,光和颜色在数字世界中扮演了更加重要的角色。每天,我们花费大量时间盯着各种电子设备的屏幕,无论是电脑、手机、平板还是电视,这些屏幕都是通过光和颜色来呈现信息的。屏幕显示的每一个图像、每一个文字,都是通过光的发射和颜色的组合实现的。
在数字媒体中,光和颜色的运用已经成为一种艺术和科学的结合。网页设计师、应用程序开发者、游戏设计师都在使用不同的颜色方案和光影效果,来打造引人注目的界面和场景。一个简单的按钮可能需要经过多次调整颜色和亮度,才能在屏幕上既清晰可见,又符合整体设计风格。
视频内容的制作也是如此。无论是电影、电视节目还是在线视频,画面中的每一个场景都依赖于光的布置和颜色的调整。导演和摄影师通过灯光的明暗、色调的变化,来传达不同的情感和氛围。即使是社交媒体上的短视频创作者,也会利用光和颜色来增加视频的吸引力,使其在众多内容中脱颖而出。
艺术与设计中的光与颜色
在艺术和设计领域,光与颜色更是不可或缺的元素。无论是绘画、摄影、雕塑还是建筑设计,艺术家和设计师都利用光和颜色来表达他们的创意和思想。
绘画是最直接的使用颜色的艺术形式。画家通过颜料的混合和运用,创造出各种各样的色彩效果,从而表现出自然景象、人物形象或抽象情感。不同的颜色组合可以传达出截然不同的情感,如温暖、冷酷、平静或激动。光在绘画中同样重要,通过明暗对比,画家能够赋予作品立体感和深度。
在摄影中,光线的控制决定了照片的质量和效果。摄影师通过调整光源的方向、强度和颜色,来捕捉最佳的瞬间。无论是自然光还是人工光,光线的变化可以改变照片的氛围,甚至可以完全改变观众对照片主题的感知。
在建筑设计中,光与颜色的运用更为复杂。建筑师在设计建筑物时,不仅要考虑结构的功能性,还要通过光的自然引入和人工照明的布置,来创造舒适的生活和工作环境。颜色则通过建筑材料的选择和室内装饰的搭配,形成建筑物的视觉形象。
交通和标识中的光与颜色
在我们的日常生活中,光与颜色也在帮助我们导航和指引方向。交通信号灯是最典型的例子,红色、绿色和黄色的灯光通过简单的颜色区分,传达出“停”、“行”和“注意”的信息。这些颜色编码已经成为全球通用的标准,几乎每个人都能立即识别和理解。
在机场、火车站、地铁等公共交通系统中,颜色和灯光被广泛用于引导乘客。不同的线路可能使用不同的颜色标识,地铁站台上的指示灯和地面上的彩色箭头都在帮助人们找到正确的方向。夜间航行时,船只和飞机也依靠不同颜色的导航灯来确保安全。
商品与消费中的光与颜色
走进商场或超市,光与颜色再次展现其无处不在的特性。商品包装、货架陈列、促销海报,这些都离不开颜色的巧妙运用。鲜艳的包装颜色可能会吸引你的目光,而温暖的灯光则可能让你感到舒适,愿意在店内多逛一会儿。商家利用颜色来区分不同的商品类型,或突出特定的促销产品,而这些颜色的选择通常基于消费者心理研究,目的是最大化销售。
在服装店中,光线的布局和颜色的选择尤为关键。柔和的灯光可以让试衣间的环境更加温馨,让顾客感到轻松自在,颜色的搭配则直接影响到顾客对服装的选择。无论是展示商品的橱窗,还是店内的陈列区,光和颜色的搭配都是为了吸引顾客的注意力,并提升购物体验。
日常生活的每个角落
从早晨的第一缕阳光,到夜晚的最后一盏灯光,光与颜色贯穿了我们日常生活的每一个角落。它们在我们的家中、街道、工作场所、公共空间、数字设备和购物环境中无处不在。尽管我们可能习以为常,但光和颜色的确是我们生活中不可或缺的元素。它们不仅使我们的世界更加丰富多彩,也让我们的生活变得更加便利和舒适。
现代人生活在一个被光和颜色包围的世界里,无论是自然环境还是人工构建的空间,光与颜色无时无刻不在影响着我们的生活方式。虽然我们可能不会时常思考光和颜色的存在,但它们早已成为我们日常生活中不可分割的一部分,渗透在生活的每一个细节中,构成了我们感知世界的基本框架。
尽管光和颜色在今天的生活中如此平常、随处可见,但在历史上,它们曾经长期困扰着人类。光是什么?颜色是如何产生的?这些问题曾是古代哲学家和科学家们不断思索和争论的课题。光和颜色看似简单,但其背后的奥秘却令无数思想家感到困惑。
在古代,光和颜色的本质是哲学和科学中一个充满争议的话题。早在古希腊时期,哲学家们就开始探讨光的本质和颜色的起源。柏拉图认为光是从物体中发出并被眼睛捕捉的,而亚里士多德则提出,颜色是光与物体表面相互作用的结果。这些早期的理论虽然为后世的研究奠定了一定的基础,但对于光和颜色的真正机制,古代思想家们仍然无法给出确切的答案。
随着时间的推移,来自不同文明的学者们继续探索光和颜色的奥秘。伊斯兰黄金时代的学者们在光学研究方面取得了重要进展,尤其是伊本·海赛姆,他的实验和理论显著推动了对光传播和反射的理解。然而,即便在这些学者的努力下,光和颜色的真相依然笼罩在神秘之中。
光和颜色不仅在科学上让人困惑,在日常生活中,它们的表现形式也是多种多样的。例如,为什么彩虹会出现?光线通过玻璃为什么会折射?不同的物体为什么呈现不同的颜色?这些现象无论在古代还是在中世纪,都充满了神秘感。虽然人们可以观察到这些现象并提出一些理论,但对这些现象的真正原因,直到牛顿时代之前,都没有一个统一的解释。
正是在这种长期的困惑中,光和颜色的问题成为了科学探索的前沿。虽然它们是我们每天都会接触到的东西,但正是因为它们的普遍性和复杂性,才使得人类对它们的理解如此困难。在牛顿之前,尽管许多学者对光和颜色提出了各自的理论,但这些理论往往是相互矛盾的,缺乏足够的实验验证和科学依据。
直到17世纪,光和颜色的谜题才逐渐揭开面纱。牛顿的出现为光学研究带来了革命性的突破。他不仅在实验中发现了光的本质,还通过一系列巧妙的实验,揭示了光和颜色之间的深层联系。牛顿的研究标志着光学研究从哲学和猜想走向了科学实验和理论验证的新时代,使得人类终于能够解释这些困扰了几千年的自然现象。
光和颜色曾经是如此神秘和不可捉摸,令古代哲学家和科学家们困惑不已。它们的普遍性掩盖了其复杂性,直到牛顿的时代,人类才得以解开这些自然界的奥秘。随着牛顿的光学研究,光和颜色的真正机制逐渐明朗,为后世的科学家们进一步探索和发展奠定了基础。
在人类历史上,对光和颜色的理解经历了漫长的发展过程。虽然牛顿的光学革命在西方科学史上占据了重要地位,但在此之前,不同文明的思想家、哲学家和科学家们早已对光与颜色进行了深入的探讨和研究。这些研究不仅限于西方世界,许多来自伊斯兰世界的贡献在中世纪对西方科学产生了深远影响,进而影响了后来的欧洲科学发展。本文将探讨从古希腊时期到17世纪前,东西方文明中的光和颜色研究,重点关注古希腊、伊斯兰世界和西方中世纪及文艺复兴时期的贡献。
古希腊时期的光与颜色理论
古希腊是西方哲学与科学的发源地,许多关于光和颜色的早期理论都诞生于这一时期。其中,最具影响力的思想家之一是柏拉图(Plato)。柏拉图认为,光是从物体中散发出来并被眼睛接收到的。他在《蒂迈欧篇》中描述了光是如何通过空气或其他介质传递到眼睛,并在眼睛内部产生视觉感受。柏拉图的学生亚里士多德(Aristotle)则提出了一种不同的观点。
亚里士多德认为,光并不是从物体中散发出来的,而是来自于光源(如太阳)的某种“发光体”。他认为,颜色是光与物体表面之间相互作用的结果。当光照射到物体上时,物体会吸收一部分光并反射另一部分,这就是我们看到的颜色。亚里士多德还提出了颜色的基本分类,他认为颜色可以分为白色、黑色以及其他由这两种颜色混合而成的颜色。
伊斯兰黄金时代的光学研究
在中世纪时期,伊斯兰世界对光和颜色的研究达到了高度的精确性和系统化,尤其是在伊本·海赛姆(Ibn al-Haytham,约公元965-1040年)的工作中达到了顶峰。伊本·海赛姆的《光学书》被认为是现代光学的奠基之作,他通过实验的方法,否定了古希腊时期流行的“光是从眼睛发射”的观点,提出光是从物体发射出来,并被眼睛接收到的。他的实验表明,光以直线传播,并且当光穿过不同介质时会发生折射和反射。
伊本·海赛姆在颜色方面的研究也非常深入。他提出颜色是光的特性之一,当光通过不同的介质或遇到不同的物体时,会发生变化,从而产生各种颜色。这种对光和颜色的理解为后来西方科学家的研究提供了重要的基础。
除了伊本·海赛姆,阿布·阿里·穆萨·本·沙卡尔(Abu Ali al-Hasan Ibn Musa Ibn Shakir)和他的兄弟们也对光的反射和折射进行了研究。他们通过几何学的原理,试图解释光的传播和反射现象,这些研究对后来的光学发展起到了推动作用。
另一位重要的伊斯兰学者阿尔·法拉比(Al-Farabi)在其哲学著作中也讨论了光的本质。他受亚里士多德的影响,提出光是天体的“发光体”发出的,它能够穿透透明的物质,并与物体表面相互作用,从而产生颜色的感知。伊斯兰学者们不仅保留和扩展了古希腊的光学研究,还结合了他们自己的实验成果,为文艺复兴时期的科学进步奠定了坚实基础。
中世纪西方的光与颜色理论
随着古希腊罗马文明的衰落,西方进入了一个被称为“黑暗时代”的中世纪时期。在这段时间里,科学的发展相对缓慢,但一些阿拉伯学者的光学研究通过译作传入西方,极大地影响了欧洲的科学发展。
伊本·海赛姆的著作在西方被广泛传播,并在文艺复兴时期成为重要的参考资料。与此同时,欧洲学者开始对光的传播、反射和折射进行研究,并尝试解释这些现象。
在13世纪,罗杰·培根(Roger Bacon)是一位重要的西方学者,他受伊本·海赛姆影响,对光学产生了浓厚的兴趣。培根认为,光是一种通过媒介传播的形式,并提出了光的折射和反射原理。他还强调了实验的重要性,这一思想对后来科学方法的发展产生了深远影响。
文艺复兴时期的光与颜色研究
文艺复兴时期,欧洲的科学和艺术迎来了复兴,对光和颜色的理解也进入了一个新的阶段。达·芬奇(Leonardo da Vinci,1452-1519年)是这一时期最著名的多才多艺的天才之一,他对光和颜色的观察和研究深刻影响了后来的科学家和艺术家。
达·芬奇在他的笔记中详细记录了他对光和阴影的观察,提出了许多关于光线传播和反射的理论。他认为,光线是直线传播的,并且在不同的表面上会产生不同的反射效果。此外,达·芬奇还对颜色的混合进行了实验,他发现通过混合不同的颜色可以创造出新的颜色,这一发现对绘画艺术的发展具有重要意义。
文艺复兴时期的另一位重要人物是约翰内斯·开普勒(Johannes Kepler,1571-1630年)。开普勒是德国的天文学家,他在研究天体运动的同时,也对光学进行了深入的研究。开普勒继承了伊本·海赛姆的理论,并进一步发展了关于光的传播和折射的理解。开普勒的研究为后来牛顿的光学研究奠定了重要基础。
牛顿之前的其他重要贡献者
在牛顿之前,还有许多科学家和哲学家对光和颜色进行了研究,为牛顿的光学革命铺平了道路。其中值得一提的是笛卡尔(René Descartes,1596-1650年)和罗伯特·胡克(Robert Hooke,1635-1703年)。
笛卡尔是法国著名的哲学家和科学家,他提出了关于光的机械理论。他认为光是一种以极高速度传播的“压力波”,类似于声音在空气中的传播。他还进行了关于光的折射和反射的实验,试图用几何学来解释这些现象。虽然笛卡尔的光学理论后来被证明是错误的,但他的方法和思想对科学研究具有深远影响。
罗伯特·胡克则是英国的科学家,他对光和颜色的研究涉及到许多实验和观察。胡克提出了光的波动理论,他认为光是由一种类似于波的运动传播的。他还观察到光通过棱镜时会分解成不同的颜色,这一现象后来成为牛顿研究的重要基础。
其他文化对光的理解
在伊斯兰世界和西方之外,其他文化也对光和颜色进行了探讨。虽然这些研究在系统性和精确性上可能不如伊斯兰世界和西方,但它们在哲学、宗教和艺术中体现了对光的独特理解。
在中国,古代思想家通过阴阳五行学说,将光和颜色与自然界的力量相联系。道家认为光是“气”的表现形式,而五行理论中,颜色则与自然元素、季节和人体脏腑相对应。在印度,光被视为神圣力量的象征,与智慧和启示紧密相连,颜色在宗教仪式中占有重要地位,并与不同的神祇和情感相对应。
虽然这些理解更多地与文化和宗教信仰相连,但它们展示了光在不同文明中的多样性意义,并丰富了人类整体的光学知识。
总结
在人类对光和颜色的理解历程中,来自不同文明的思想家们以各自独特的方式为这个领域做出了贡献。从古希腊到伊斯兰世界,再到中世纪和文艺复兴时期的欧洲,不同文化和思想流派在光与颜色的探索中展现了他们独特的视角和智慧。
在伊斯兰世界,通过精确的实验和几何分析,学者们对光学进行了系统的研究,为西方世界的发展提供了重要基础。西方中世纪的学者在伊斯兰世界研究的基础上进一步发展了这些理论,并在文艺复兴时期将光学研究推向新的高度。牛顿之前的科学家们通过实验与理论推导,为现代光学的诞生奠定了基础。
总之,光和颜色的研究不仅是科学的一部分,也反映了不同文明对自然界的理解与探索。尽管牛顿的光学革命在西方科学史上具有重要意义,但在他之前,人类在不同文明中的积累和探索同样值得铭记与尊重。这些多样化的研究不仅丰富了我们的科学知识,也展示了科学作为全人类智慧结晶的多样性与复杂性。
待续……
在wenxuecity上看到一片文章,原文发表于3月12日,转载如下:
